Acoustic Damping with a Helmholtz Resonator
Published:
Wave Theory of Sound
Two fundamental equations in acoustics are
- Continuity Equation
The continuity equation states that the rate at which mass enters a system is equal to the rate at which mass leaves the system plus the accumulation of mass within the system.
- is fluid density
- is the velocity vector of the fluid
This equation is essentially .
- Momentum Equation
The momentum equation states that the rate of change of momentum of a fluid element is equal to the sum of the pressure gradient force, convective acceleration, and body forces.
- is the pressure
- is the body forces per unit mass.
This equation is essentially .
Wave Equation
The ambient state is characterized by its pressure , density , and fluid velocity . Acoustic disturbances are regarded as perturbations to the ambient state.
It can be derived from the previous two equations that the acoustic pressure , which is the difference between the pressure at and the ambient pressure, satisfies the wave equation
where is the speed of propagation. For simplicity, we only consider the one-dimensional case.
Sinusoidal Plane-wave
Suppose the sound we use in this experiment is a sinusoidal wave with a constant angular frequency . By introducing phasors, then by separation of variable, the solution is
Plug back into the wave equation to get
or simply
which is a very familiar second-order linear ODE. The general solution is
where is called the wave number. Finally, the total solution is
where are determined by initial and boundary conditions.
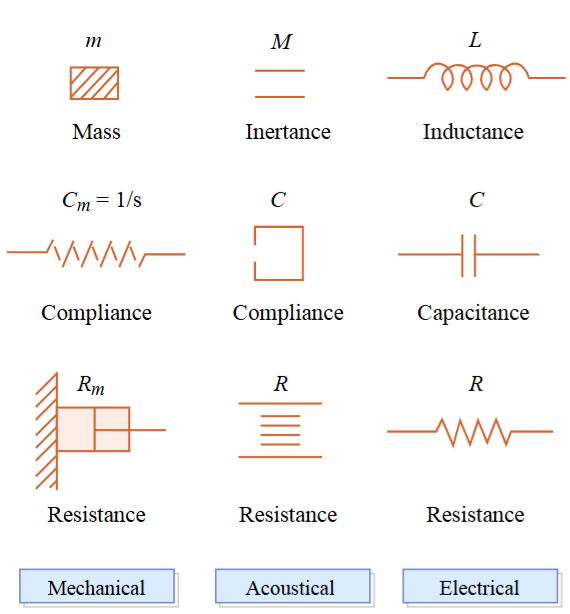
Acoustical Two-ports
Consider a model in the figure below where an acoustic element is located between two straight ducts.
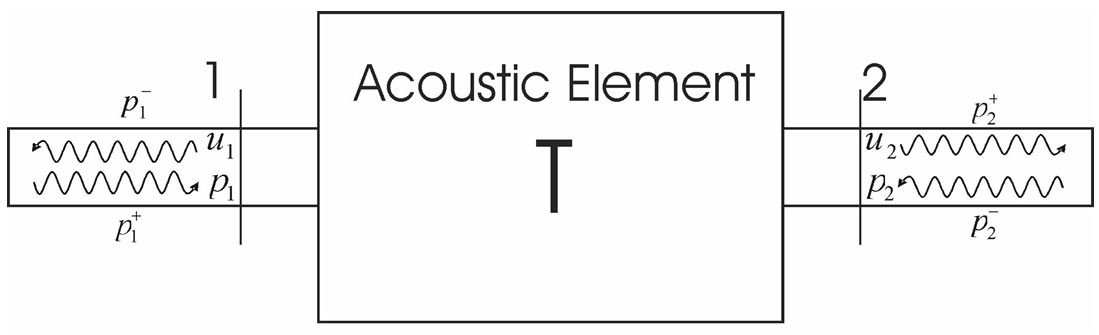
This two-port system is fully characterized by an acoustic transfer matrix, which can be written as a relation between the pressure and velocities on each side of the two-port system.
We need to consider two variables , the acoustic pressure and the volume velocity , which are analogous to voltage and current in electric circuits respectively. Then, similar to Kirchhoff’s voltage and current law, we have the continuity of pressure law and continuity of volume law.
Continuity of Pressure
This law states that acoustic pressure does not vary appreciably over distances much less than a wavelength. Consider a path from to ,
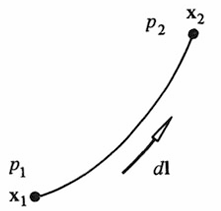
Starting from the momentum equation (Equ. 2), neglecting nonlinear term , and integrate along the path, we get,
where is the density of the medium, and is the particle velocity vector.
Continuity of Volume Velocity
This law states that the net volume velocity flowing out of a volume is zero.

Starting from the continuity equation (Equ. 2), with an application of Gauss’s theorem, we obtain
Acoustic Impedance
We can define the acoustic impedance as the ratio of acoustic pressure and volume velocity,
Notice that a proper definition can be found here.
For a Helmholtz Resonator, geometry shown below,
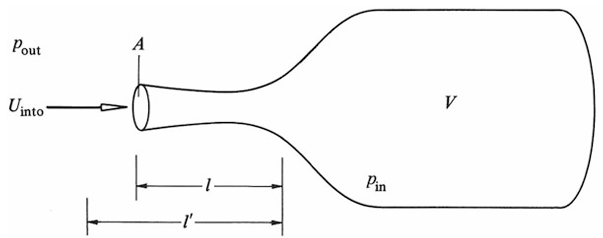
we have,
where is the acoustic compliance, and is the acoustic inertance, is the “effective neck length”.
Reflection and Transmission
The reason why Helmholtz Resonator can reduce noise is that it can “reflect” incident acoustic wave almost completely when the frequency of the wave is at the resonance frequency.
We define the reflection coefficient as the ratio of the intensity of the transmitted wave () to the incident wave (),
It can be derived that (but I don’t know how), for Helmholtz Resonator,
At the resonance frequency,
The acoustic impedance of HR is
Then,
Thus the resonator has the potentially useful property of causing nearly total reflection of acoustic waves at frequencies near its resonance frequency. That’s why it is useful for acoustic damping.
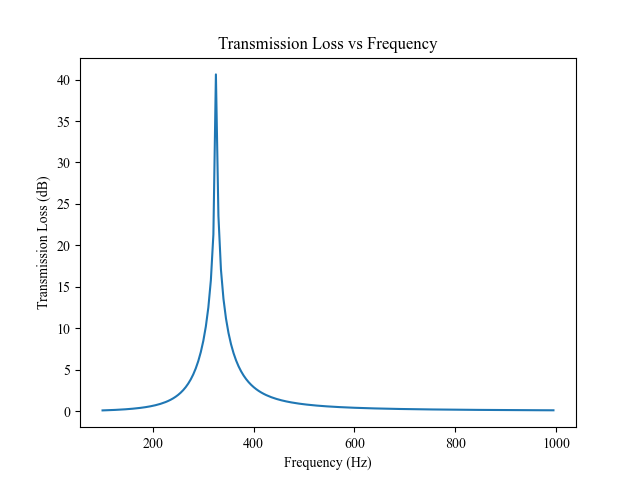
The transmission loss is defined as
By setting proper value for , we can plot the transmission loss vs. frequency
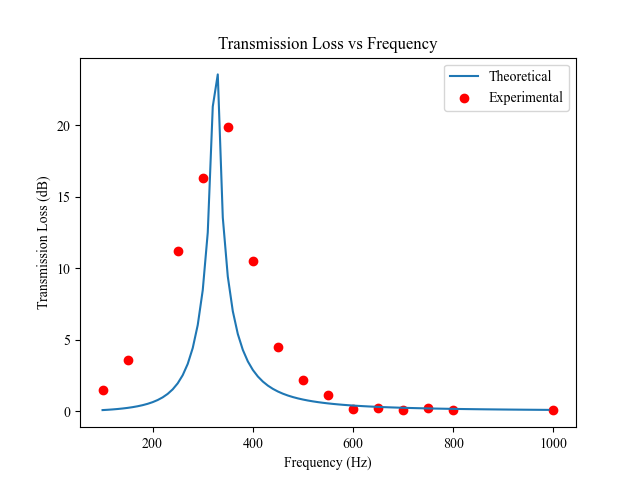
Experiment
In the experiment, we want to measure the sound transmission loss of a Helmholtz Resonator for different frequency. The setup is shown below

where test specimen is a HR connected as a side branch.
We use the loudspeaker to generate a sinusoidal wave at frequency , then on the left hand side (upstream),
and on the right hand side (downstream),
Here is the incident wave, is the reflected wave, and is the transmitted wave. By definition, the transmission loss is
To solve for and , we use four microphone to measure the acoustic pressure at four different places,
Solving for ,
For convenience, we can take , then the transmission loss is
The microphone record voltage signal, which is proportional to the acoustic pressure , apply Fourier transform, take
Thus, we can see that are just the Fourier coefficient at the given frequency. Since we only need to ratio, by applying a Fast Fourier Transform directly to the voltage signal, and take their ratio will give the same result.
Share on
Bluesky Facebook LinkedIn X (formerly Twitter)You May Also Enjoy
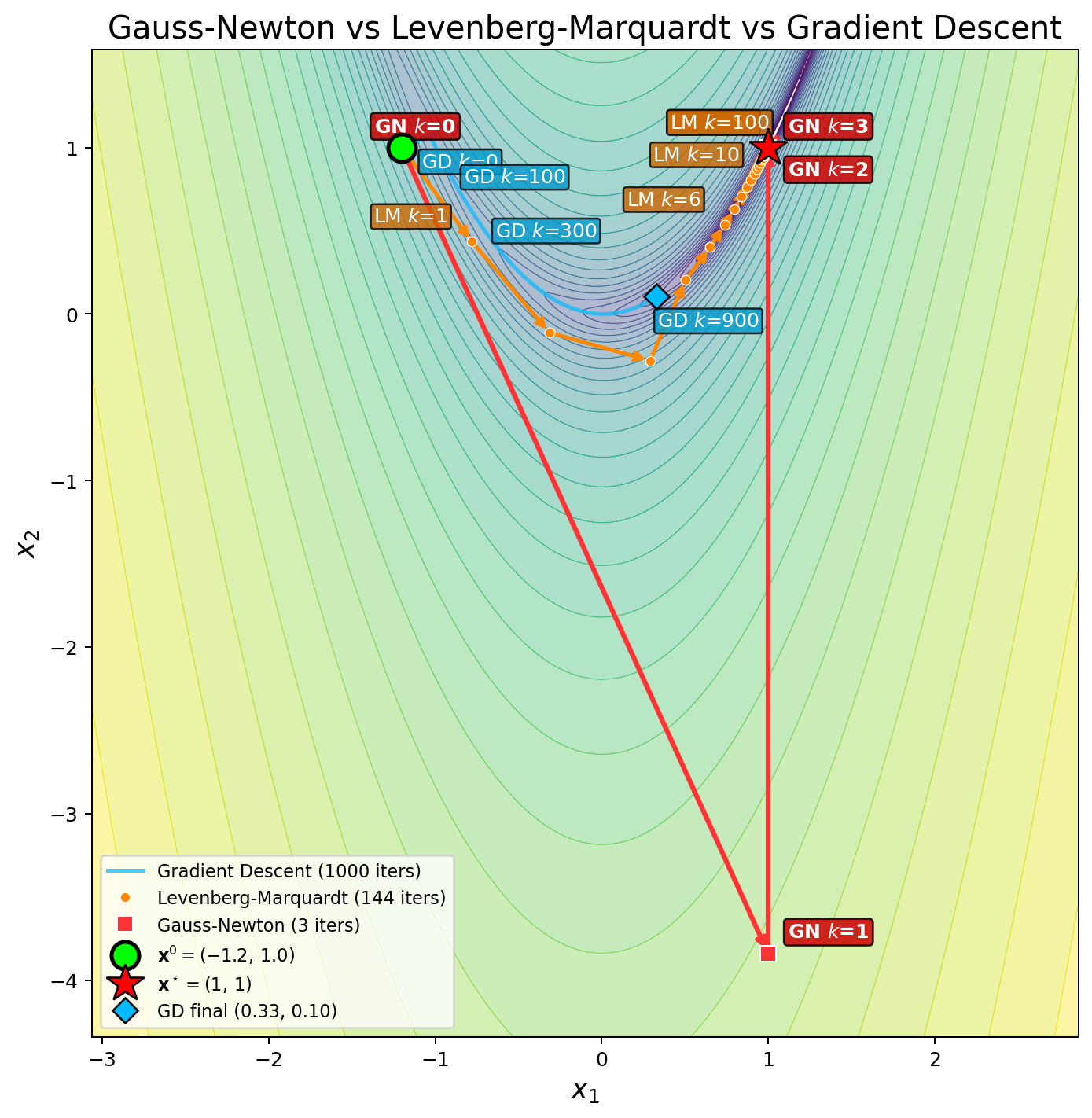
In common engineering problems, the optimization problem is to minimize the residual of a parametric model with respect to some observed data points.Given N...
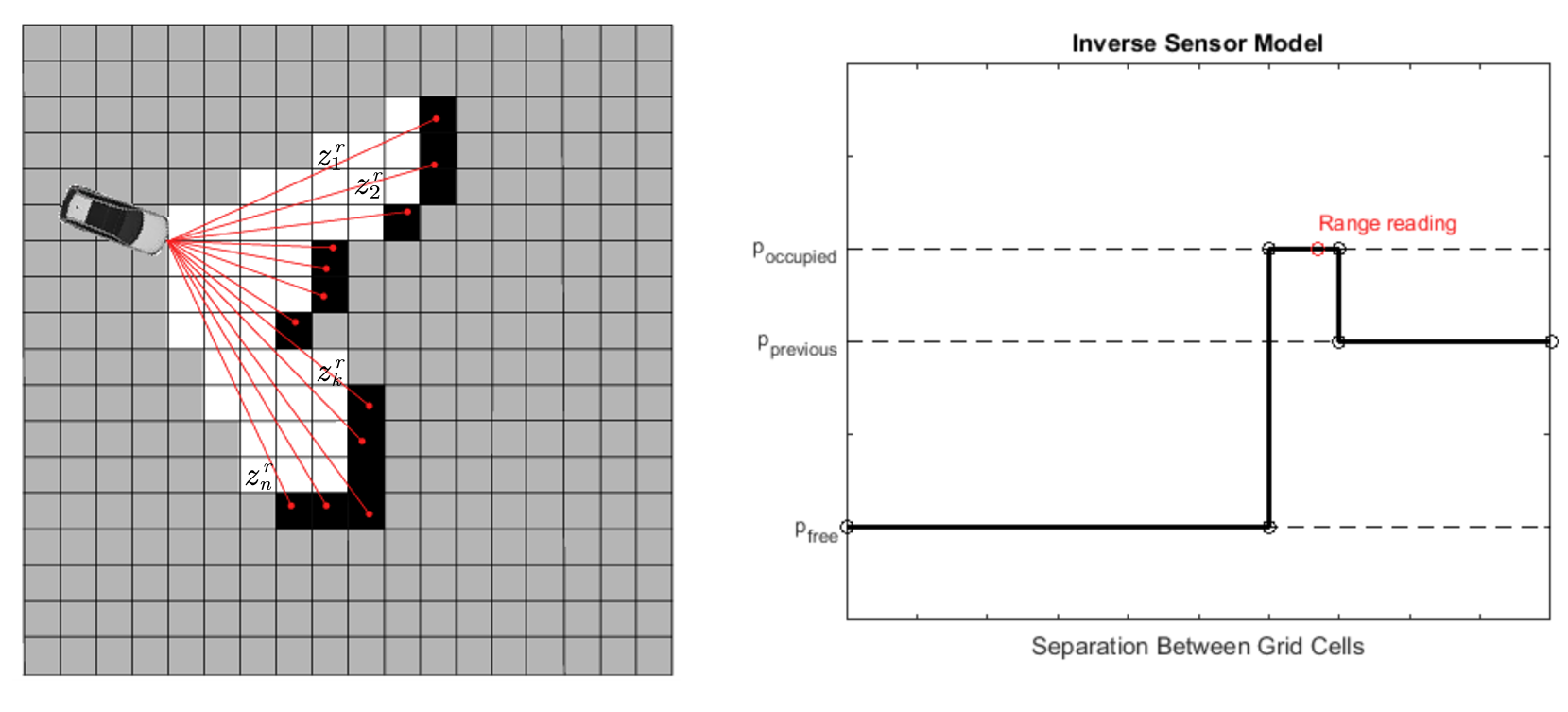
Besides state estimation or localization, which provide a robot with knowledge of where it is, it’s equally important for a mobile robot to perceive its surr...
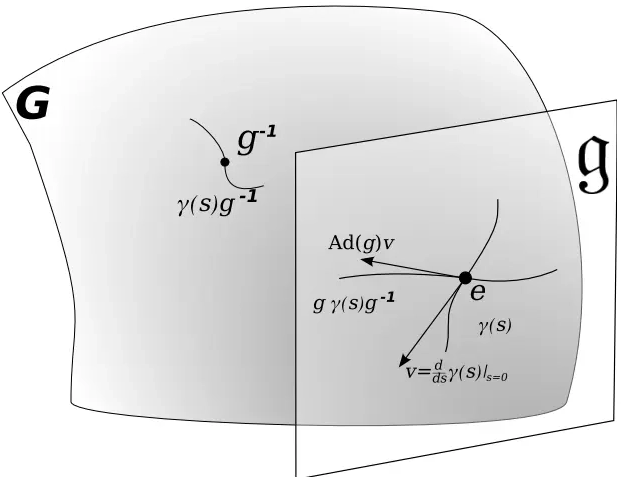
This note covers some of the fundamental concepts in Lie group and Lie algebra, and their applications to representing rigid body motion in robotics. A group...

In robot state estimation, the Bayes filter is a probabilistic approach that estimates the state from a sequence of controls and measurements by recursively ...