Now, we consider a somehow more general case, where we want to solve a linear second-order homogeneous equation with coefficients that are polynomials. Consider the following equation
p(t)y′′+q(t)y′+r(t)y=0
where p(t)=0 in some interval and p(t),q(t),r(t) are polynomials of t.
Properties of Power Series
An infinite series
y(t)=n=0∑∞an(t−t0)n=a0+a1x+a2x2+⋯
is called a power series about t=t0. The following are some of its properties.
All power series have an interval of convergence. This means that there exists a nonnegative number ρ such that the infinite series converges for ∣t−t0∣<ρ, and diverges for ∣t−t0∣>ρ. The number ρ is called the radius of convergence of the power series.
The power series can be differentiated and integrated term by term, and the resultant series have the same radius of convergence.
One simple method to determine the radius of convergence of a power series is the Cauchy ratio test. Suppose
n→∞limanan+1=λ
Then the radius of convergence is ρ=λ1.
Many functions f(t) that arise in applications can be expanded in power series, i.e., there exists a series of coefficients a0,a1,a2,… so that
f(t)=n=0∑∞an(t−t0)n
Such functions are said to be analytic at t=t0, the series expansion is called the Taylor series of f about t=t0, and the coefficients can be found by
an=n!f(n)(t0)
The radius of convergence can be determined if we treat the function f in the complex plane. Let z0∈C be the point that is closest to t0 that f(n)(z0) fails to exist, then the radius of convergence is ρ=∥z0−t0∥.
The product of two power series is still a power series, this product is called the Cauchy product
For a second-order equation with variable coefficients (but are analytic functions, at least), although it’s not very rigorous, we can first expect that the solution y is also a power series. Then, by doing series expansion and setting the polynomial coefficients properly, we can expect the equation to hold. A formal statement of this is as follows.
Let the functions q(t)/p(t) and r(t)/p(t) have convergent Taylor series expansions about t=t0, for ∣t−t0∣<ρ. Then, every solution y(t) of the differential equation
p(t)y′′+q(t)y′+r(t)y=0
is analytic at t=t0, and the radius of convergence of its Taylor series expansion about t=t0 is at least ρ. Set
y(t)=a0+a1(t−t0)+a2(t−t0)2+⋯
the coefficients are determined by plugging the expression into the differential equation and setting the sum of the coefficients of like powers of t in this expression equal to zero.
However, it is possible that sometime p(t0)=0, and the above method of series expansion will fail to work, but we still want to find a solution around the point t=t0. One possible case is Euler’s equation.
Euler’s Equation
The differential equation
t2y′′+αty′+βy=0
where α,β∈R are constant is known as Euler’s equation.
This equation has a singular point at t=0 and the series solution method above cannot work. However, we can treat t>0 and t<0 separately.
First, assume that t>0.
For t<0, let t=−x (x>0), and let y=u(x). Then the equation is transformed into
x2u′′+αxu′+βu=0
which should have the same solution as the case when t>0. Thus, for the final solution, we only need to put a modulus on t.
Observe that t2y′′, ty′, and y will have the same order if y=tr. Our goal is to find two independent solutions. Therefore, we plug in y=tr into the equation.
dtdtr=rtr−1,dt2d2tr=r(r−1)tr−2
The original equation then becomes,
[r(r−1)+αr+β]tr=0
Hence, y=tr is a solution if and only if r is a solution of the quadratic equation
r2+(α−1)r+β=0
Two Different Real Roots, (α−1)2−4β>0
The general solution is given by
y(t)=c1tr1+c2trt
where r1,2=−21[(α−1)±(α−1)2−4β].
Two Equal Roots, (α−1)2−4β=0
One solution that is obvious is
y1(t)=tr1
where r=21−α.
To find the second independent solution, applying the differential operator
L=t2dt2d2+αtdtd+β
and rewrite the equation as Ly=0. Plug in y=tr, we have
L[tr]=(r−r1)2tr
Taking partial derivatives of both sides with respect to r gives
∂r∂L[tr]=L[∂r∂tr]=∂r∂[(r−r1)2tr]
That is
L[trlnt]=(r−r1)2trlnt+2(r−r1)tr
We can see that if r=r1, then the right-hand side will vanish. Therefore, the second solution is
y2(t)=tr1lnt
The general solution is
y=(c1+c2lnt)tr1
Two Complex Solutions, (α−1)2−4β<0
Let
r1=λ+iμ,r2=λ−iμ
and
ϕ(t)=tλ+iμ=tλ[cos(μlnt)+isin(μlnt)]
It can be shown that the real and imaginary parts are two independent solutions. Therefore,
Here, we want to find a class of singular differential equations that is more general than Euler’s equation. A very natural generalization is the following
L(y)=y′′+p(t)y′+q(t)y=0
where p(t) and q(t) can be expanded in series of the form
In this case, the equation is said to have a regular singular point at t=0. Equivalently, an equation has a regular singular point at t=0 if functions tp(t) and t2q(t) are analytic at t=0. It has a regular singular point at t=t0 if functions (t−t0)p(t) and (t−t0)2q(t) are analytic at t=t0.
We focus on the interval t>0 and multiply through the equation by t2 and get
t2y′′+t(tp(t))y′+t2q(t)=0
Compare the above equation with Euler’s equation, and find that it seems like adding higher order terms, i.e., by changing α to tp(t)=n=0∑∞pntn, and changing β to t2q(t)=n=0∑∞qntn. Therefore, we may be able to obtain a solution by plugging in higher order term to the original tr solution. Specifically, let
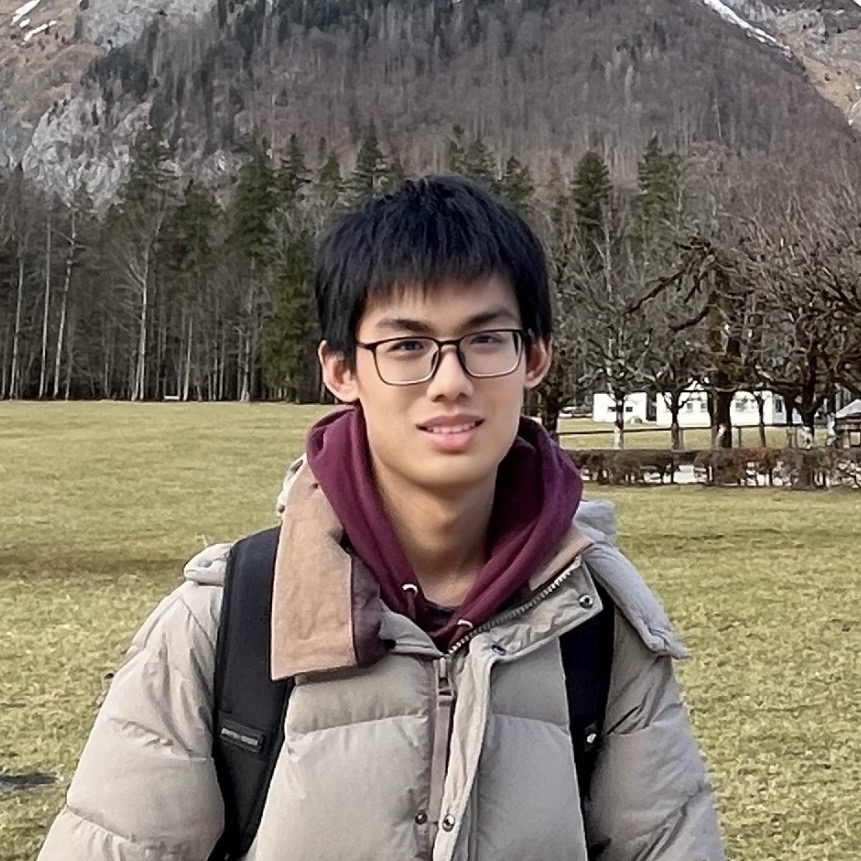
In common engineering problems, the optimization problem is to minimize the residual of a parametric model with respect to some observed data points.Given N...
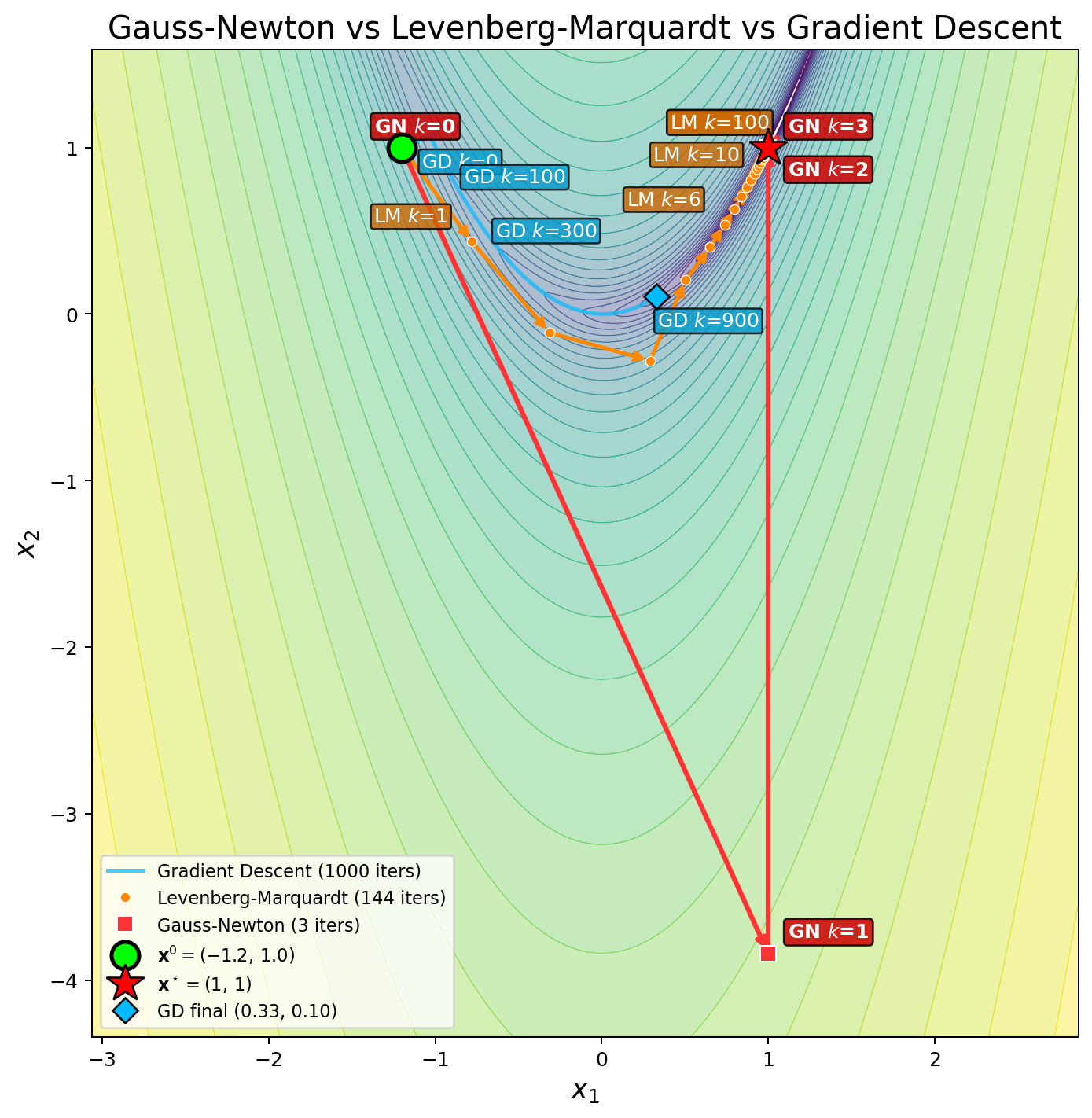
Besides state estimation or localization, which provide a robot with knowledge of where it is, it’s equally important for a mobile robot to perceive its surr...
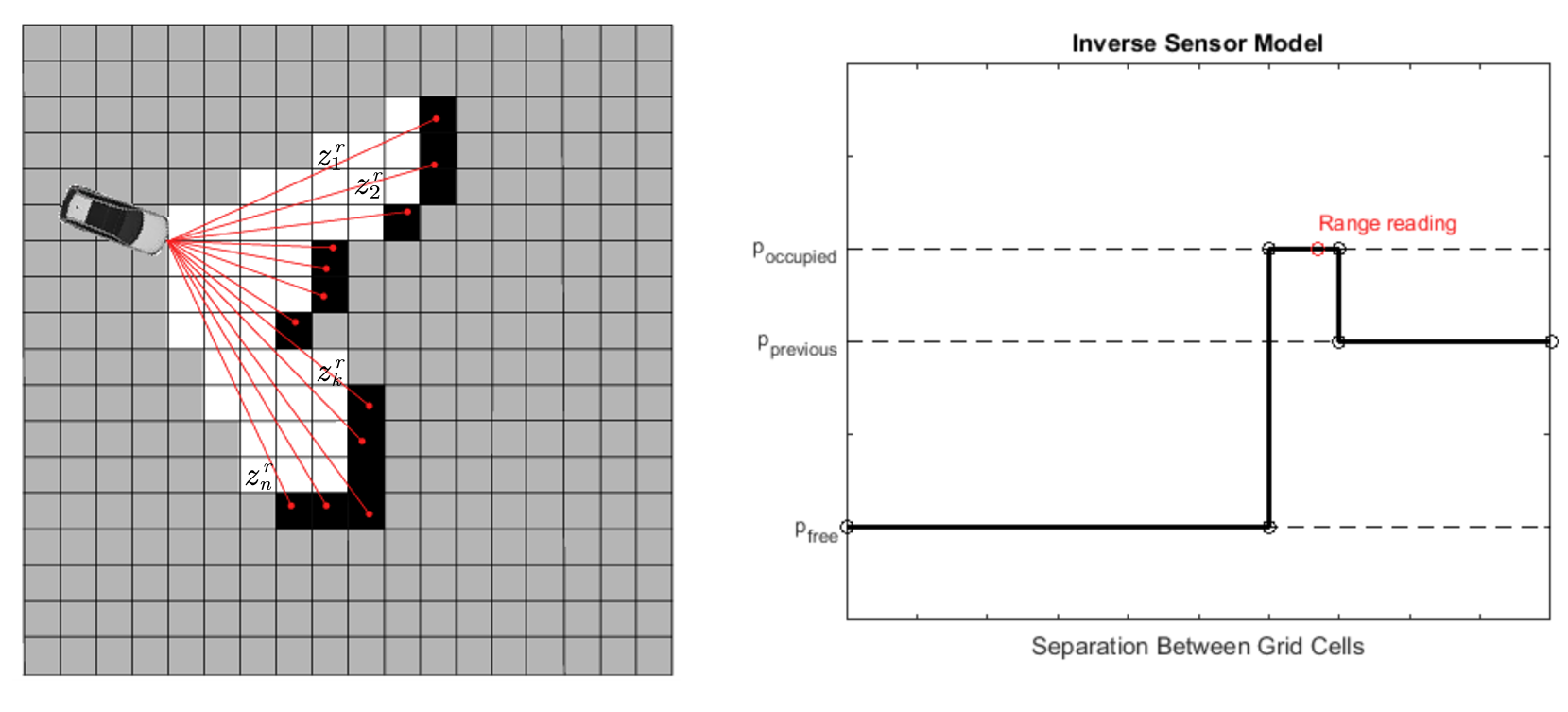
This note covers some of the fundamental concepts in Lie group and Lie algebra, and their applications to representing rigid body motion in robotics. A group...
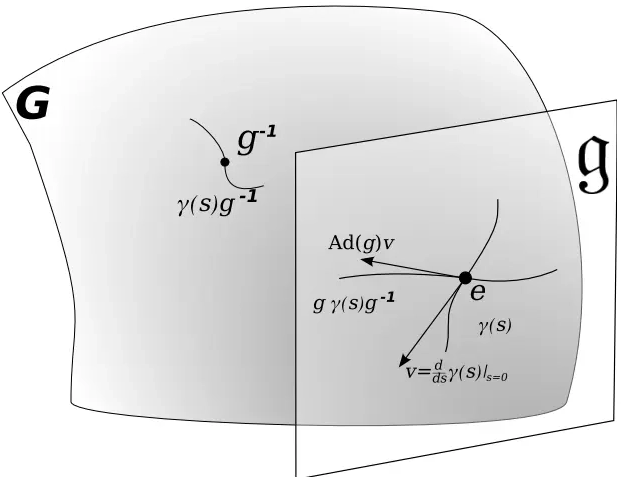
In robot state estimation, the Bayes filter is a probabilistic approach that estimates the state from a sequence of controls and measurements by recursively ...